
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- GPU
- Noteshelf
- 아이패드 noteshelf
- 하나은행 인턴 후기
- 리퀴드텍스트
- 프로그래머스
- 노트쉘프
- 아이패드 논문 필기
- windows10
- liquid text
- 딥러닝
- 하나은행
- 아이패드 필기
- 아이패드 필기어플
- 논문 필기
- 아이패드 논문
- 파이썬
- 아이패드
- 하나은행 공채
- pytorch로 시작하는 딥러닝
- 주석 단축키
- pytorch
- Python
- 2022 하나은행 인턴 후기
- 필기 어플
- 하나은행 인턴
- 아이패드 노트쉘프
- deep learning
- 굿노트
- TensorFlow
- Today
- Total
Azure Zest
[ python ] 사진 원하는 모양으로 오려내기 본문
사진을 원하는 모양을 잡아 그 부분만 segmentation 해보자.
사진을 이진화시킨 후, 경계면을 다듬어 마스크를 만들어 낸 후, 이를 사진에 다시 적용시켜 그 부위를 오려내고자 한다.
0. 사용할 라이브러리 import
import cv2
import numpy as np
import matplotlib.pyplot as plt
from skimage.segmentation import clear_border
import skimage.morphology as mp
import scipy.ndimage.morphology as sm
1. 사진 이진화 하기


다음과 같은 사과 사진이 있다고 하자.
마스크를 만들기 위해 이진화를 시킬텐데, opencv를 이용할 것이다. 이 때, binary를 적용시키기 위해 흑백으로 영상을 불러낸다.
img = cv2.imread('/content/drive/My Drive/lung/다운로드.jpg',0)
print(img.shape) # --> (183,276)위와 같이 cv2.imread 뒤에 0을 붙이면 흑백으로 불러들이게 된다.
그 다음, 임계값을 잡아 다음과 같이 이진화시킨다. (Reference 1 참고)
th,img1 = cv2.threshold(img,0,255,cv2.THRESH_OTSU)

2. 그림 다듬기
2-1. 형태 잡기
여러가지 방법을 이용하여 추출하고 싶은 마스크의 대략적인 모양을 만든다. (흰 부분이 마스크에 해당하므로 원하는 부분이 흰 색(1)이 되도록 고치자.) (Reference 2 참고)
img1 = 255-img1 # 위의 사과 그림은 까만색(0)이므로 반전해준다.
img2 = clear_border(img1) # 경계면을 다듬는다.
disk2 = mp.disk(2) # 디스크 생성
# 여러가지 morphology mothod를 이용
img2 = mp.binary_dilation(img2, disk2)
img2 = mp.binary_erosion(img2, disk2)
img2 = mp.binary_opening(img2, disk2)
img2 = mp.binary_closing(img2, disk2)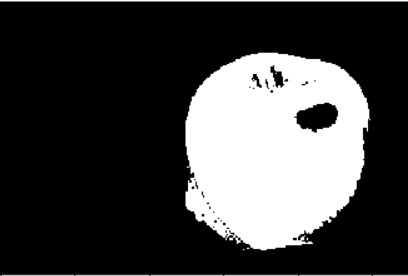
2-2. 구멍 메우기
위의 사과 마스크 안의 구멍을 메워준다.
img2 = sm.binary_fill_holes(img2)

3. 마스크와 사진 겹치기
위의 생성된 마스크와 사진을 겹쳐 마스크에 해당하는 부분을 사진에서 얻는다.
img2 = (img2*1).astype('uint8') # cv2의 기본 데이터타입은 'uint8'이므로 바꿔준다.
masked = cv2.bitwise_or(img,img,mask=img2) 
4. 사진 보기
plt.imshow(img)
plt.imshow(img, cmap='gray') # 흑백으로 사진을 보고싶을 때
사진을 원하는 모양으로 오려내는 방법을 살펴보았다.
본문에서는 간단하게 살표보았지만, 마스크의 모양을 좀 더 세세하게 다듬으면 원하는 모양을 얻을 수 있을 것이다.
Reference
이미지 임계처리 — gramman 0.1 documentation
기본 임계처리 이진화 처리는 간단하지만, 쉽지 않은 문제를 가지고 있다. 이진화란 영상을 흑/백으로 분류하여 처리하는 것을 말합니다. 이때 기준이 되는 임계값을 어떻게 결정할 것인지가 중요한 문제가 됩니다. 임계값보다 크면 백, 작으면 흑이 됩니다. 기본 임계처리는 사용자가 고정된 임계값을 결정하고 그 결과를 보여주는 단순한 형태입니다. 이때 사용하는 함수가 cv2.threshold() 입니다. cv2.threshold(src, thresh, maxval
opencv-python.readthedocs.io
2. Morphology
Module: morphology — skimage v0.17.dev0 docs
If True, a pixel at coordinate, e.g., (4, 7) will be represented by coordinates (3.5, 7), (4.5, 7), (4, 6.5), and (4, 7.5). This adds some “extent” to a pixel when computing the hull.
scikit-image.org
Operations on Arrays — OpenCV 2.4.13.7 documentation
Parameters: mat – 2D or N-dimensional matrix; currently matrices with more than 4 channels are not supported by the methods, use Mat::reshape() as a possible workaround. distType – distribution type, RNG::UNIFORM or RNG::NORMAL. a – first distribution para
docs.opencv.org
'Deep Learning' 카테고리의 다른 글
| [ python ] 주석 / 주석 단축키가 안 될 때 (0) | 2020.05.08 |
|---|---|
| [ colaboratory ] google 400 error (0) | 2020.05.07 |
| [ Anaconda ] Anaconda 가상환경 (0) | 2019.11.15 |
| [ Anaconda ] Anaconda 환경 변수 입력하기 (3) | 2019.11.15 |
| [ PyTorch ] PyTorch 설치하기( with 아나콘다) (1) | 2019.11.15 |


